
OTC Daihen
AImega AX-V4L AP
Cena katalogowa: 51000 EURO
Nasza cena: 17500 EURO
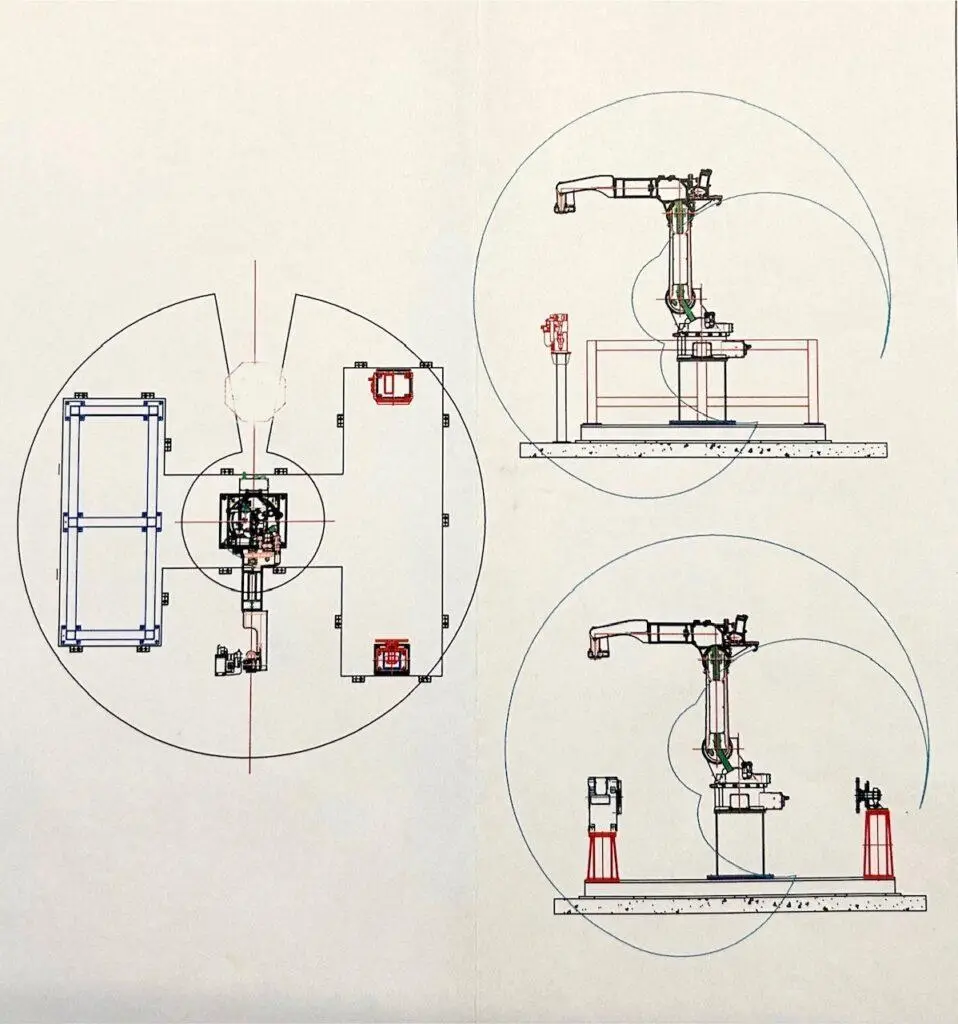
Stanowisko zrobotyzowane do spawania MIG/MAG z dodatkową osią umożliwiającą obracanie detalem w trakcie procesu spawania.
Cela z trzema oknami załadunkowymi. Kompletna zabudowa z dachem, dwie bramy sterowane automatycznie, drzwi serwisowe, okno przesuwne, wentylacja.
Stół stały 2120x870mm, stół obrotowy 2660×870
Pełna integracja, programowanie parametrów spoiny bezpośrednio z programu ruchu manipulatora, wbudowany PLC do obsługi logiki celi, dwa panele startowe po dwa pola startu.
Pena dokumentacja umożliwiająca integrację, kompletne dane enkoderów.
Dane techniczne / opis / wyposażenie:
- Robot Manipulator AX-MV4LAP – Model 1AL10101YZ5826708
- Robot Control Unit AX-C – Model AXCAL1-C000
- Robot Positioner AX-1PB250 -Model AXPB251-E
- Stacja czyszcząca, podajnik drutu z rolki.
- Inwertor cyfrowy OTC DP-320
Robot spawalniczy OTC Typ: AX V4L robot 6-cioosiowy z jednostka sterująca AX-C i manualnym programatorem z kablem 5 m, kable połączeniowe
Cyfrowo – Inwertorowe źródło prądu spawania OTC Typ: DP320 z kablami sterującym i interfejsem spawalniczym
Wyposażenie spawalnicze OTC Typ AXV4L-MTXC3531-DP system podawania drutu, uchwyt chłodzony gazem, kable i węże połączeniowe, stabilizator.
Urządzenie czyszczące uchwyt spawalniczy (palnik) Jednostka usuwająca zanieczyszczenia osadzające się w wewnątrz dyszy gazowej palnika – do poprawnego funkcjonowania wymagane jest sprężone powietrze ( 6 bar)
Dodatkowa os zewnętrzna jako pożyczone jednoosiowy 1PB250 ze sterowaniem
W skład zestawu wchodzi pozycjoner jednoosiowy o dopuszczalnej obciążalności 250 kg, serwowzmacniacz oraz kable zasilająco sterujące o dł. 5 mb. Zestaw umożliwia pełne sterowanie z poziomu panelu roboczego – jest widoczny jako kolejna os w systemie.
OPIS | Źródło DP-320 | |
Metoda spawania | MIG/MAG DC/DC-Puls | |
Fazy | 3 | |
Częstotliwość | HZ | 50/60 |
Napięcie zasilania | V | 400 15% |
Moc | KVA | 15.5 KVA (DC Puls), 13.3KVA (DC) |
Zakres prądowy | 30-320 | |
Zakres napięciowy | V | 10-38 |
Cykl pracy | % | 50% przy 320 A 100 % przy 220 A |
Wymiary | mm | 250 x 640 x 580 (bez podajnika) |
Waga | kg | 46 |
AX-V4L AP podstawowe dane techniczne
Dane techniczne | |||
Nazwa | AX-MV4L AP | ||
Kinematyka-budowa | Pionowe ramie przegubowe | ||
Liczba osi | 6 | ||
Max. obciążenie | 4 kg | ||
Dokładność pozycjonowania | $0,1 mm (uwaga 1) | ||
System napędu | AC Servo Motor | ||
Moc napędów | 5150 W | ||
Sprzężenie zwrotne | Encoder wartości bezwzględnej | ||
Zasięg pracy Ramie | J1obrót w osi 1 | $170° ($50°) (uwaga 2) | |
(obszar | J2 ruch pionowy w osi 2 | -155° ~+ 1000 | |
roboczy) | J3 obrót w osi 3 | -170° ~+ 190° | |
Przedramię | J4 obrót w osi 4 | +155° | |
Z | J5 pochylanie uchwytu w osi 5 | -45° ~+225° | |
nadgarstkiem | J6 skręt w osi 6 | +205° | |
Maksymalne | Ramie | J1obrót w osi 1 | 2,97 rad/s (150%/s) |
prędkości | J2 ruch pionowy w osi 2 | 2,97 rad/s (160°/s) | |
J3 obrót w osi 3 | 3,05 rad/s (170/) | ||
Przedramię | J4 obrót w osi 4 | 6,11 rad/s (340%/s) | |
Z | J5 pochylanie uchwytu w osi 5 | 5,93 rad/s (340/) | |
nadgarstkiem | J6 skręt w osi 6 | 9,08 rad/s (520%/s) | |
Udźwig | Dopuszczalny | J4 obrót w osi 4 | 10.1 Nm |
przedramienia | moment | J5 pochylanie uchwytu w osi 5 | 10.1Nm |
(Z | J6 obrót w osi 6 | 2.94Nm | |
nadgarstkiem) | Dopuszczalny | J4 obrót w osi 4 | 0,38 kgm’ |
moment | J5 pochylanie uchwytu w osi 5 | 0,38 kgm* | |
obrotowy | J6 obrót w osi 6 | 0,03 kgm’ | |
Przestrzeń pracy | 6,53 m’ x 340° | ||
Temperatura i wilgotność otoczenia | 0-45°C, 20-80% RH (bez kondensacji) | ||
Waga | 270 kg | ||
Obciążenie dodatkowe w osi 3 | 12 kg (uwaga 3) | ||
Miejsce montażu | Podłoga, sufit lub ściana | ||
Pozycja wyjściowa (startowa) | Nie trzeba pamiętać (uwaga 5) | ||
Kolor | Ramie: biała, Podstawa: niebieski | ||
Robot sterowany jest za pomocą kontrolera AX-C z kolorowym intuicyjnym panelem sterującym. Kontroler wyposażony jest w system operacyjny Windows , co pozwala na łatwość przeprowadzania operacji aktualizacji systemowych. Istnieje możliwość rozbudowy systemu o kolejne osie zewnętrzne. Posiada pełną bibliotekę przycisków funkcyjnych, co pozwala na dowolna konfiguracje i indywidualne dostosowanie do potrzeb klienta. Wbudowana karta 1/0 pozwala na komunikacje z urządzeniami zewnętrznymi, w standardzie znajdują się 32 wejścia oraz 32 wyjścia – istnieje możliwość rozbudowy o kolejne moduły (32/32), aż do 128/128
Wbudowane PLC pozwala na stworzenie bardziej zintegrowanego systemy, którym możemy zarządza z poziomu kontrolera. Istnieje możliwość bezpośredniego podłączenia monitora zewnętrznego – taka konfiguracja udostępnia obserwacje wykonywanych zadań na TP większej grupie osób.
Parametry
llosc stopni swobody: | 6 |
Udéwig: | 4 kg |
Zasieg: | 2006 mm |
Powtarzalnosc: | $0.1 mm |
Waga robota: | 270 kg |
Waga kontrolera: | 155 kg |
Zasilanie: | 400 V |
Sterowanie | PTP,CT |
Interfejsy | Ethernet |
Porty 1/0 – 24V | 32/32
|
Sterowanie osiami zewnętrznymi | dodatkowe osie 1
|
Interpolacja | liniowa, kołowa, osiowa |
Podtrzymanie pamieci | bateryjne ( 3 lata) |


Ogłoszenie ma charakter informacyjny i stanowi zaproszenie do zawarcia umowy (art. 71 Kodeksu cywilnego); nie stanowi natomiast oferty handlowej w rozumieniu art. 66 § 1 Kodeksu cywilnego..